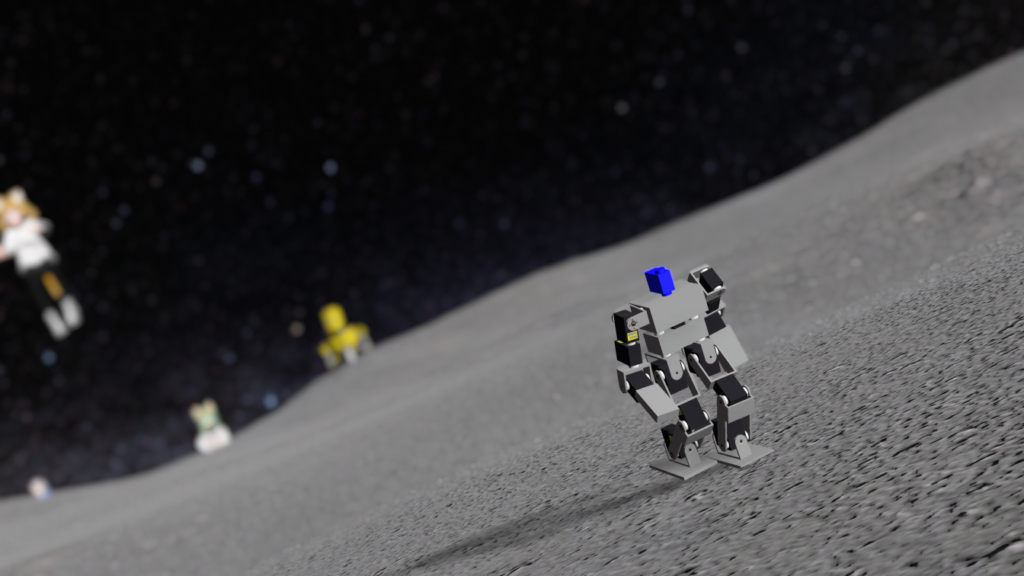
メタバースで、仮想二足歩行ロボットの格闘技大会を開催するにあたって、二足歩行ロボットの動きをシミュレーションするためのシステムとして、バンボー(Bambo)氏により開発されたのが、VRロボットシミュレーター「Yenda(読み:イェンダ)」です。
Yendaとは、チェワ語(東アフリカ マラウイの国語)で”歩く”という意味になります。
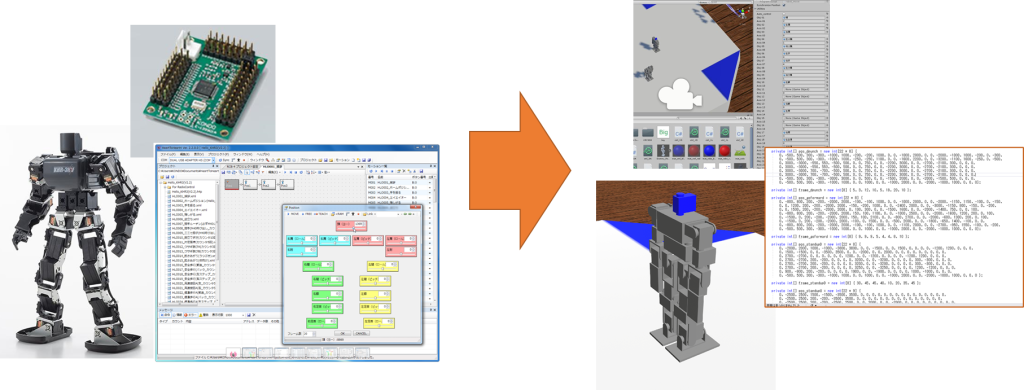
Yendaは、実際に市販されているホビーロボット実機の制御システムと同等のものをVRChatに移植したシステムになります。
仮想二足歩行ロボットの動作(モーション)に関して、VRChatの基幹システムであるUnityの「アニメーション」と呼ばれる仕組みを使わず、ロボット実機で使っているモーションファイルをUdon(※)に変換するシステムを開発し、ロボットの動きを制御しています。
この技術により、VRChatの物理シミュレーション空間内で、現実のホビーロボットと同じように、ロボットモデルをリアルタイムで制御できます。
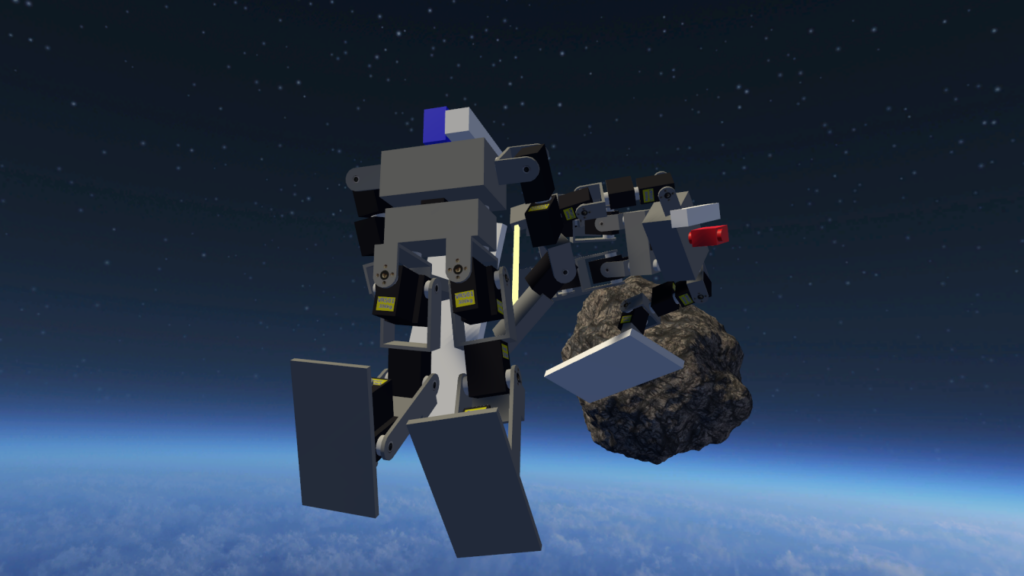
また、メタバース空間で、ロボットコントローラー実機の操作のに近い操縦が出来るロボット遠隔操作の仕組みも作りました。
これにより、ロボット操作中は、一時的にVR機器のコントローラーで直接ロボットを操縦できます。まるで実際の二足歩行ロボットを操縦したときに近い体験が可能になりました。
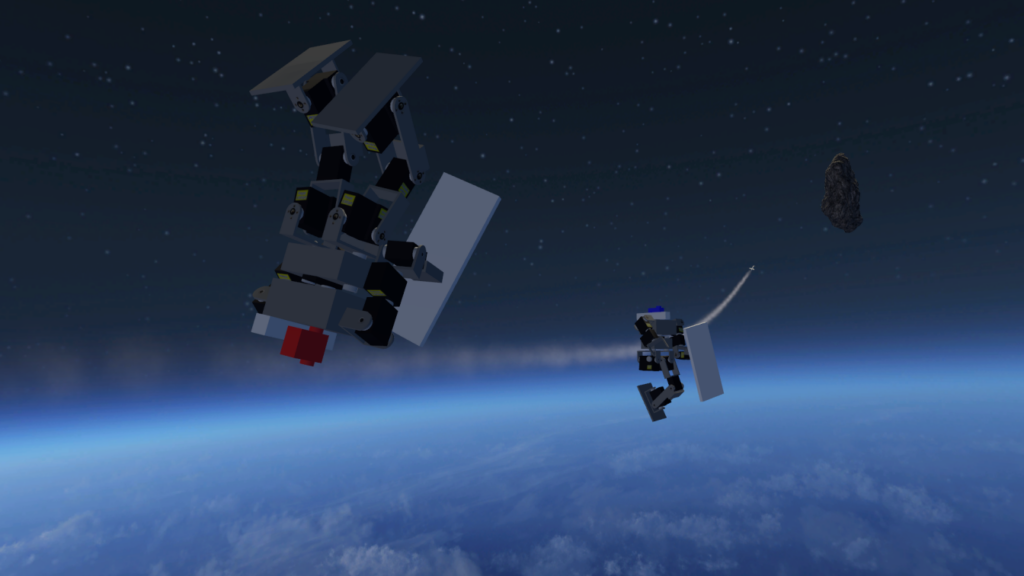
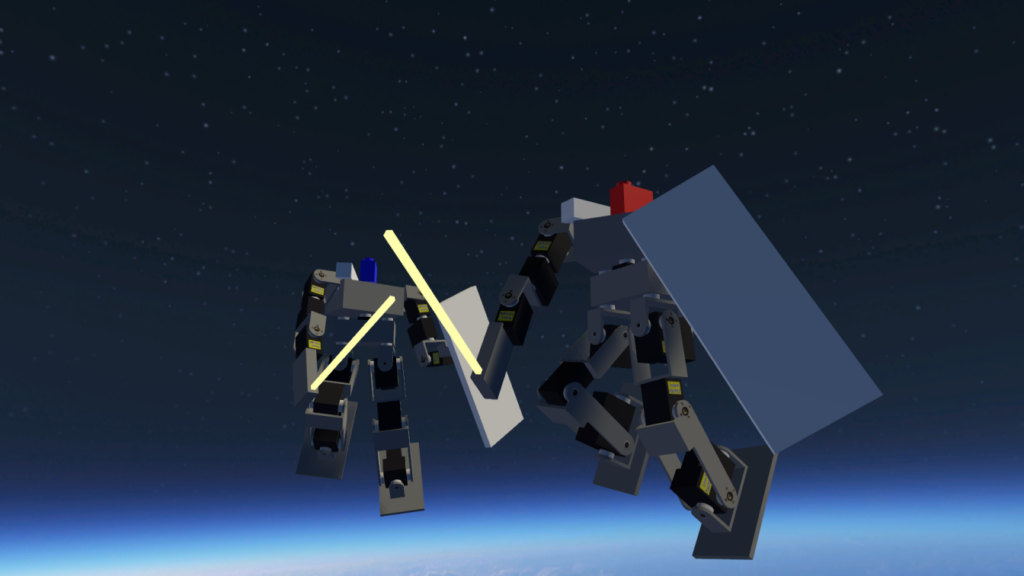
ロボットTVゲームとロボットシミュレーターの大きな違いとして、ロボットシミュレーターは物理演算により実世界のロボットの動きを再現させているところにあります。
これはゲームではなく、あくまでもメタバースでの、「ロボットコンテスト」なのです。
※ UdonとはVRChatに用いられるプログラム言語です